Solution matériel et logiciel
Schémas de fonctionnement
J'ai prévu 2 modes de contrôle commande :
- Matériel - Télécommande radio
- Logiciel - Télécommande web
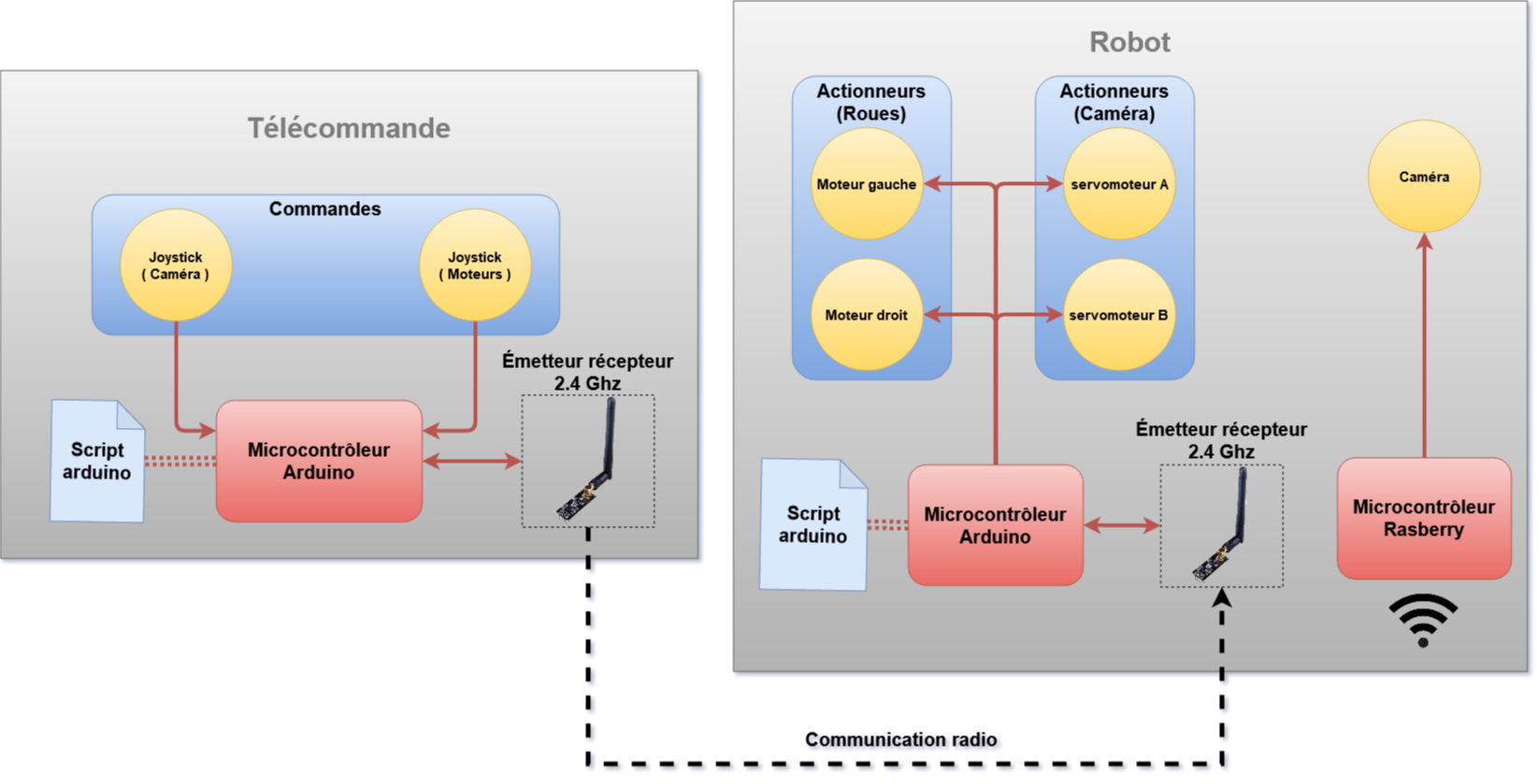
Matériel
La première solution nécessite la réalisation d'une télécommande.
Dans ce cas la communication entre la télécommande et le robot est réalisée via les ondes radios.
Les composants principaux sont une carte arduino uno, 2 joystick, des leds et un émetteur récepteur
2.4
ghz.
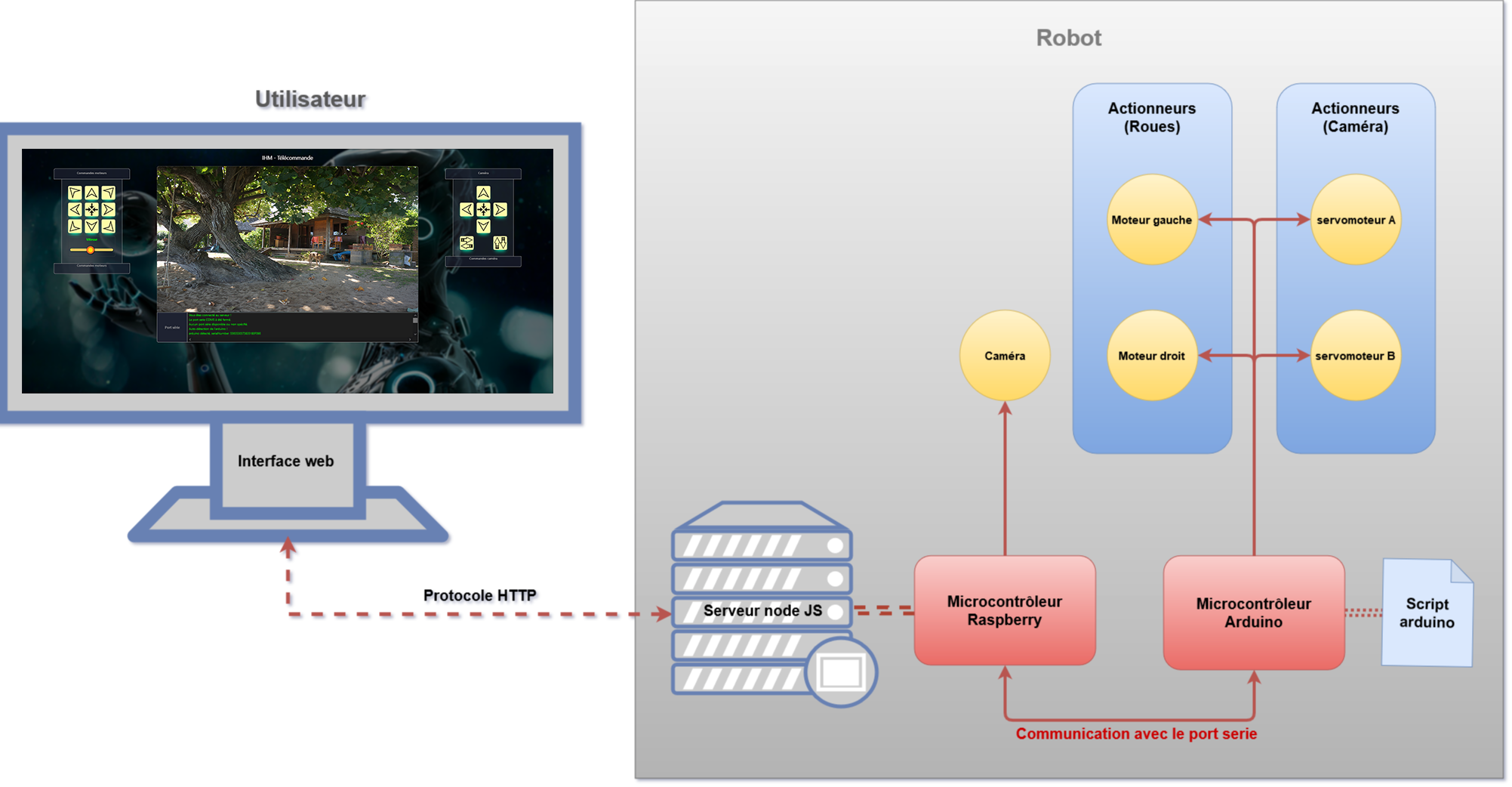
Logiciel
La seconde méthode nécessite le développement d'une interface web connectée à un serveur. J'ai opté
pour
une technologie de type front end.
Node Js permet de développer en quelques lignes un serveur
fonctionnel, c'est un environnement d'exécution JavaScript asynchrone et orienté événement.
Le noyau de Node.js est tout petit. De base, Node.js ne sait en fait pas faire grand chose, mais il
est
très riche grâce à son extensibilité, il existe des milliers de modules (extensions) qui offrent des
fonctionnalités variées.
Comme le montre le schéma ci-dessous, le contrôle commande est géré par le microcontrôleur arduino.
Pour que l'arduino puisse exécuter les différentes actions , il doit pouvoir communiquer avec le
serveur.
Le port serie (port de communication) de type USB va permettre l'échange des données entre le
serveur et
l'arduino.
Le module Node SerialPort permet d'interagir entre les deux périphériques.